By Yiming Li
Another lamp glows brightly; draw nearer and observe. Light is wondrous—invisible and intangible, yet tangibly present before your eyes. They say light possesses form, dashing through the world before you, leaving its mark wherever it passes.
If I were to say we can control the form of light, would that be possible? To me, light itself can become a material—reflected, refracted—allowing one to perceive its beauty. This is an art installation centred on light. In this project, I employ materials such as mirrors, transparent acrylic sheets, and servo motors to artificially manipulate the path of light. This enables viewers to observe the dynamic movement of light rays and witness the creation of exquisite patterns.
This is a project divided into two parts. Consequently, as the first part of the entire project, I devoted considerable time to conducting research and building prototypes. I also undertook several “small experiments”. I spent some time considering how best to articulate my thoughts and address the finer details—such as the installation’s construction and technical aspects.
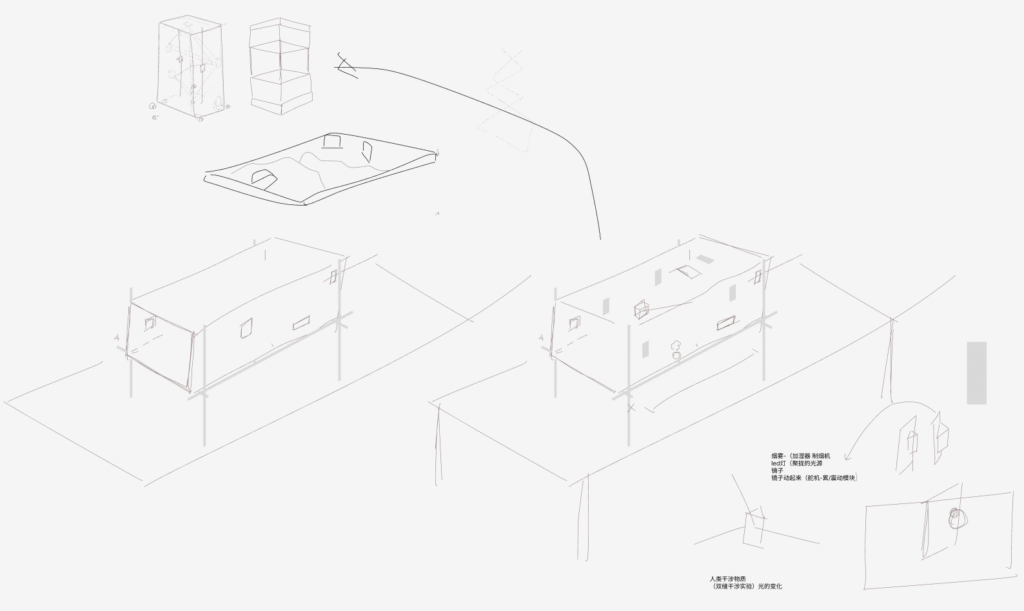
Returning to my primary research section, my original conception was that the entire apparatus should be a flat plane. I could mount all components (mirrors, servos, etc.) horizontally upon it, but I realised I preferred observing both the reflected patterns and the light’s path. Moreover, three-dimensional space actually facilitates light propagation better than a flat plane (a point I recognised after revisiting some high school physics). A flat surface would block roughly one-third of the light source and render it uncontrollable. Consequently, I swiftly abandoned my initial concept and endeavoured to construct it in three dimensions.
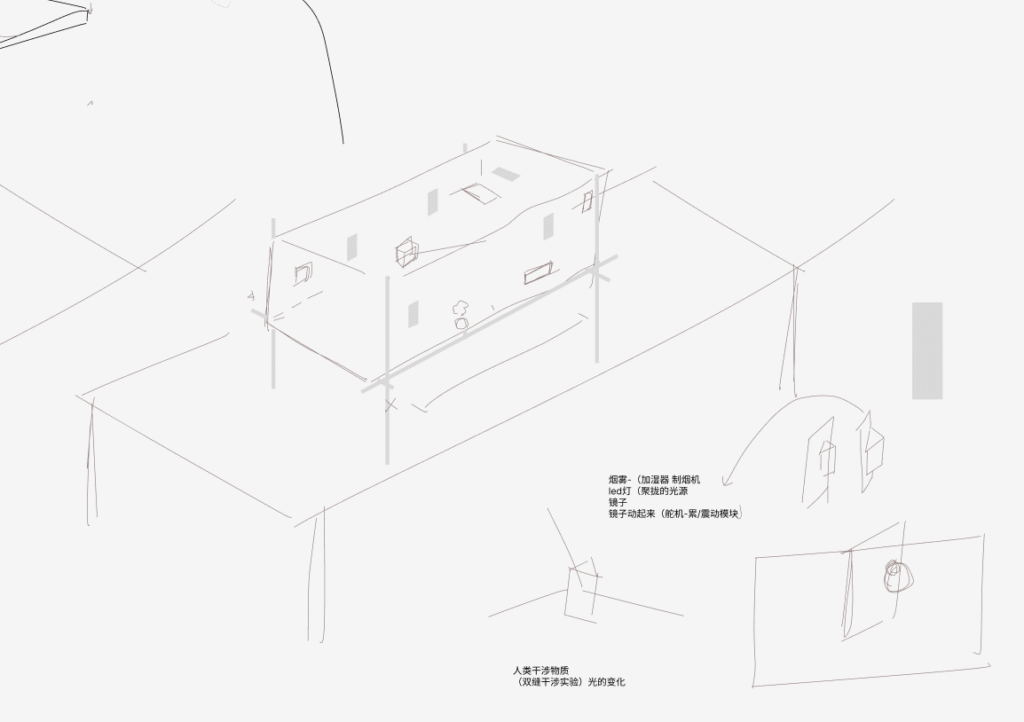
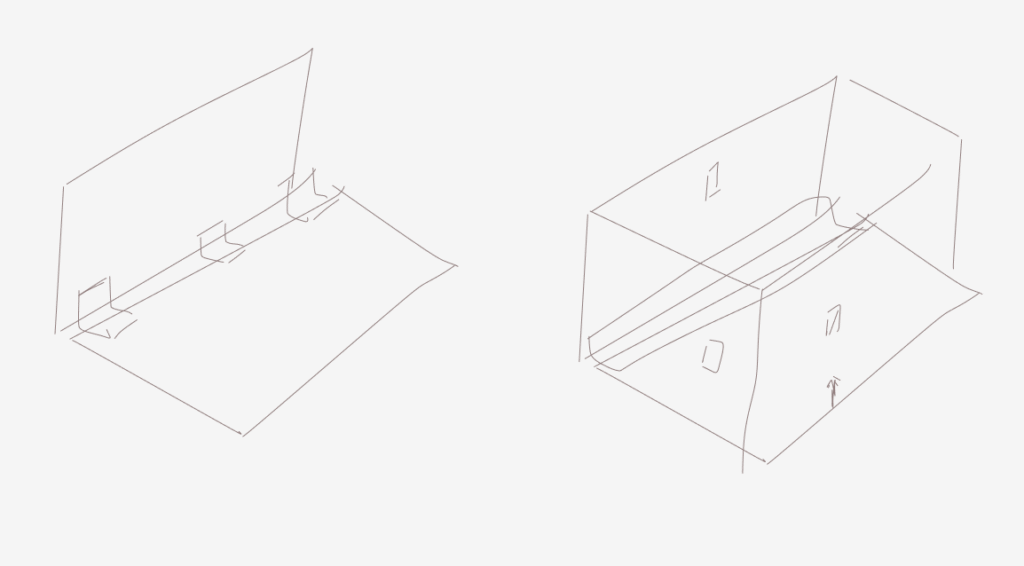
I transformed it into a fully enclosed design, more akin to a “glowing box”. I shall continue developing the design based on this composition. In truth, I’d rather call it a “kaleidobox” – much like a kaleidoscope, one observes it to behold the beautiful patterns drawn by light within. Delving deeper into the design, I initially intended it to be a box that could open and close, or have transparent sides, but this always felt somewhat impractical. Consequently, I revised these aspects. I will incorporate small windows on the front of the box, allowing observers to glimpse the interior scenes from different angles through these apertures. This approach also minimises the environmental impact on the installation. Multiple internal light sources could be employed, each emitting distinct colours from varied angles. Simultaneously, I have a brilliant concept: light would manifest within specific mediums. Thus, I could fill the box with artificial smoke, allowing observers to visibly trace the paths of light as it propagates. As for the positioning of the mirror and servo motor, along with the acrylic colour paper, I still need to conduct some research to determine the optimal angle and orientation.
Subsequently, I found myself compelled to contemplate the feasibility of human-machine interaction and to seek a balance between technology and aesthetics.




rAndom / rAndom International — “Fragments”, “Audience”, “Blur Mirror”
Daniel Rozin — “Wooden Mirror”/“PomPom Mirror”
In certain works, artists employ miniature servo/motor-driven mirror units to enhance projects’ interactivity and immersion through real-time sensing mechanisms such as cameras, infrared, ultrasound, or distance sensors. This establishes a complex self-other reflexive relationship between the viewer and the environment, offering me numerous insights into designing interactive mechanisms.
The mirrors in these works function more as a medium, with the artists tending to use machinery to magnify interpersonal relationships or to “anthropomorphise” machines. The audience, meanwhile, resembles an output signal. This approach differs markedly from my own perspective, though it is not without merit. The techniques employed—such as modularising installations and implementing integrated control systems—have provided me with numerous insights for designing human-machine interaction.
Fortunately, I still had some leftover materials from last year’s Control project—an arcade joystick, a potentiometer, and several buttons. I attempted to connect them to the Arduino board to control the servo motor. This part required some time, so I decided to set it aside for the moment.



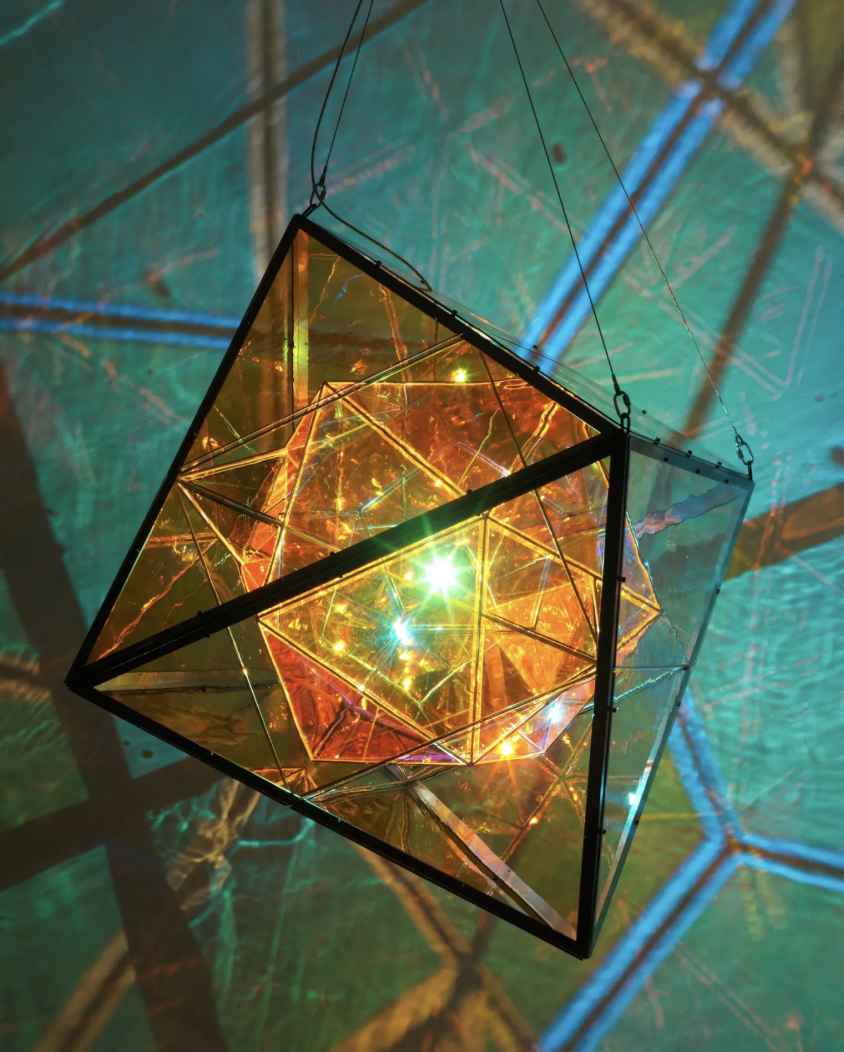
Olafur Eliasson-“Your Spiral View”, “Mirror Mirror”, “Your Star House”
This is an artist I greatly admire. To be honest, his work was the first thing that came to mind when I began my research. Olafur Eliasson employs mirrors and reflections as central elements in his exploration of spatial perception and audience interaction. Works such as Your Spiral View, Mirror Mirror, and Your Star House utilise large-scale polished metal, handcrafted glass, coloured mirrored panels, and structural steel. Through geometric arrangements and angled designs, these pieces create fractured and overlapping visual effects, inviting viewers to experience their own perceptions within the interplay of light, shadow, and space. His mastery of light and shadow has reached the pinnacle, offering me much to learn and draw inspiration from. His work has enlightened me regarding how to set reflection angles and colours, and how to make all of this controllable.
Although his works do not possess a great deal of “mechanicality” nor place undue emphasis on the process of human-machine interaction, from a purely aesthetic perspective, the patterns produced by these installations remain remarkably beautiful.
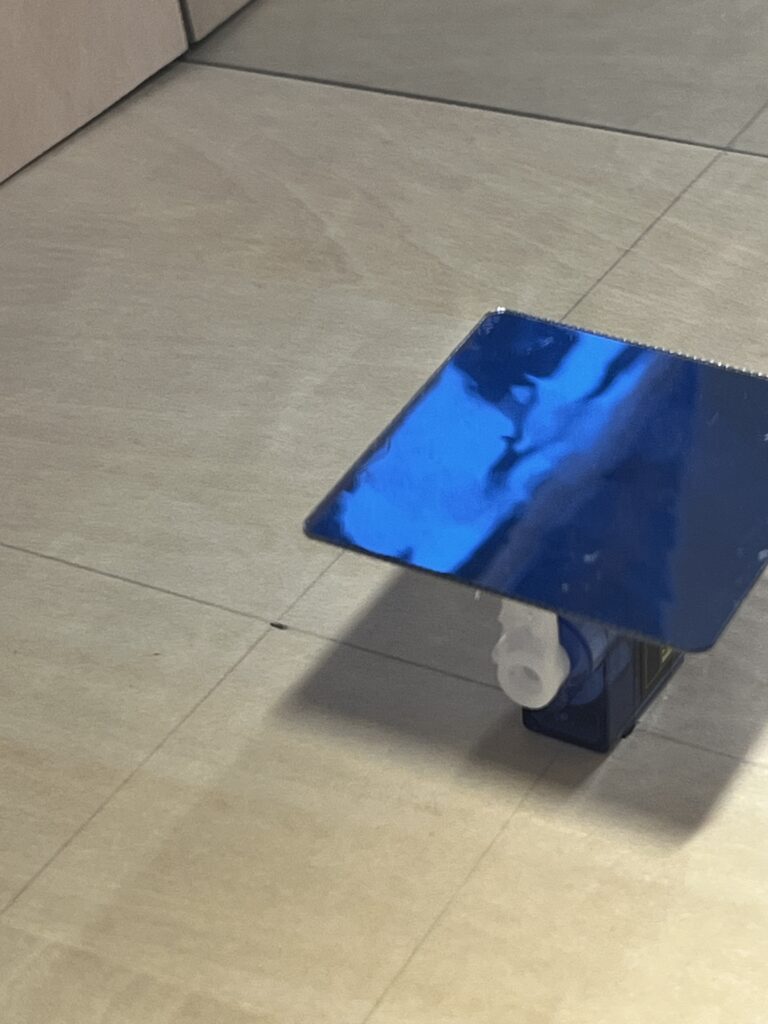
Next, I attempted to build a prototype. I purchased some wooden boards, but I was unable to secure a slot for laser cutting, so I had to cut them by hand. I attempted to cut out some holes the size of servo motors, organised the wiring, and proceeded to install them.

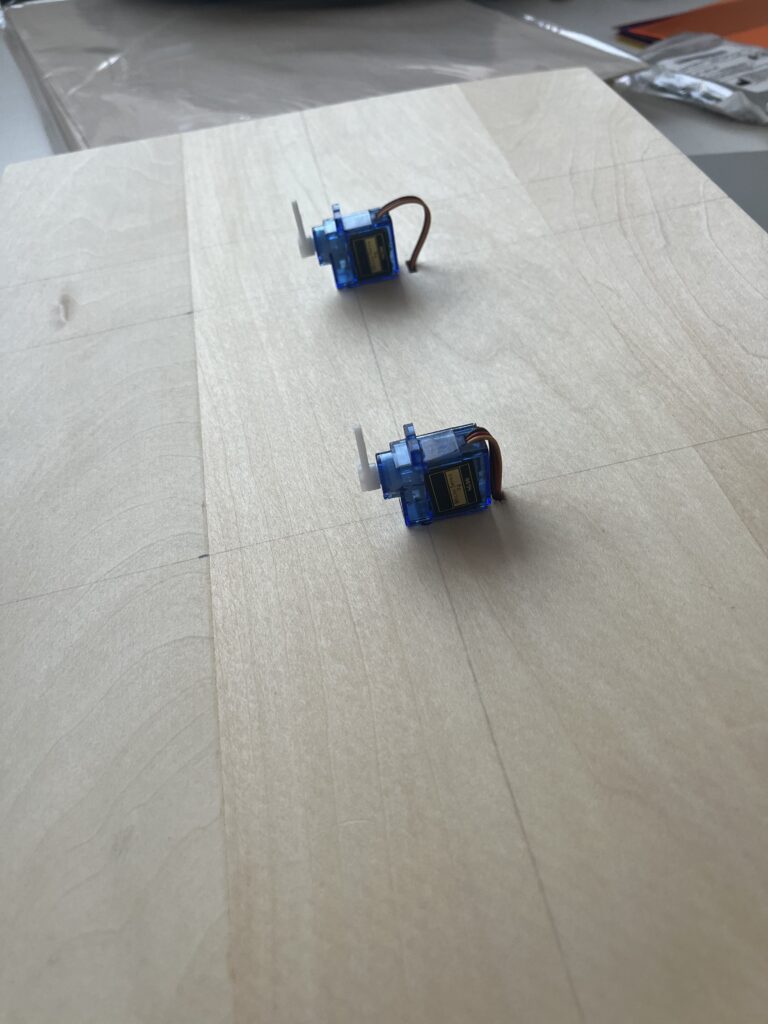

This serves as a prototype, which I use to demonstrate basic functionality during reviews and conduct minor experiments. I’ve written some code to animate the rudders, enabling them to reflect light.

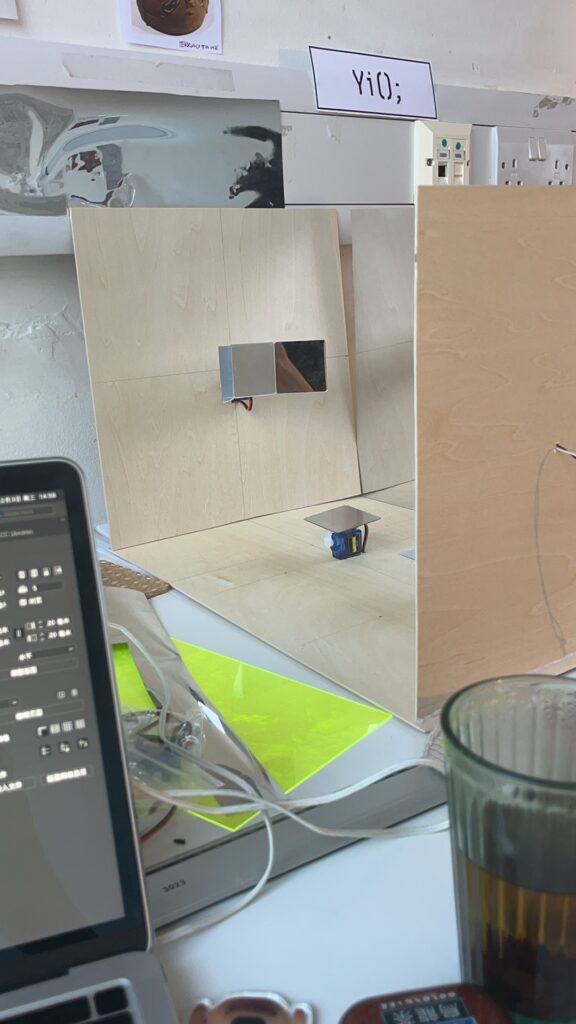
This model will be fully enclosed. I began to consider how I should go about controlling it. Since there wouldn’t be just three servos, getting them to truly synchronise their movements (steering to different angles) was quite a challenge. I began approaching the problem using the same top-down methodology mentioned earlier. Fortunately, I had some arcade joysticks and buttons which I could connect to the Arduino board.

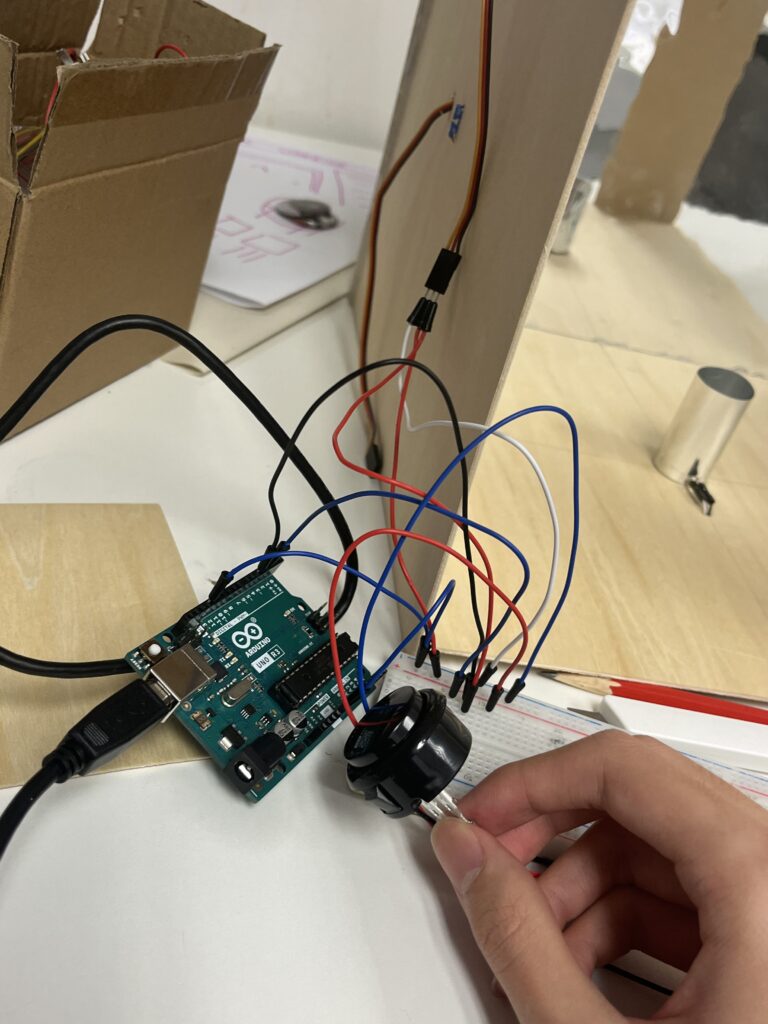
It took me a while to figure out how this joystick operates. Contrary to my assumption that it had nine directional signals, it’s actually comprised of four simple push-button switches. Consequently, the signals it outputs are essentially combinations of these four buttons.
By the final review day, I felt there remained much to be done, and I required more substantial primary research material. I did not wish to overreach or complicate the entire project unduly; I needed to reconsider the feasibility of certain aspects. I hope to make some progress in the latter half.